Research activities
-
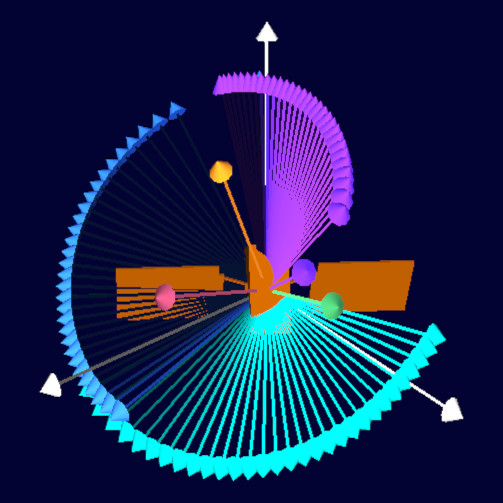
- Attitude control of rigid body
- It is crucial for a satellite to know its direction in the three-dimensional space. If the attitude of the satellite has an error for the desired value, it is necessary to control it with high accuracy. A large amount of force is required to rotate a heavy object, but if the force is too large, it will spin too much, and if it is not strong enough, it will take a long time to change direction. We are thinking of a control method that allows even heavy objects to rotate quickly and without unnecessary movement.
ATTITUDE CONTROL
-
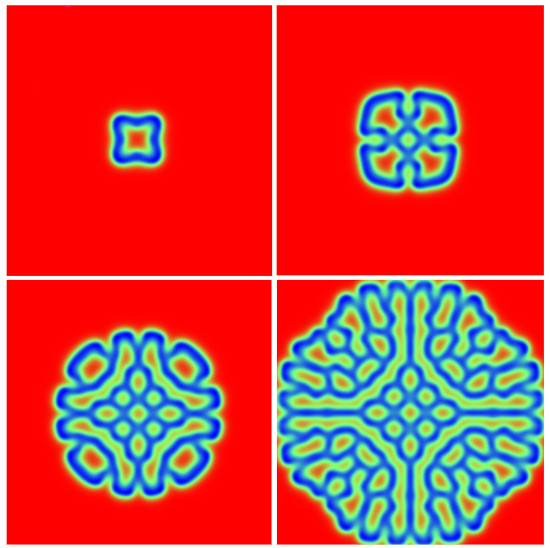
- Pattern formation in reaction-diffusion systems
- Like the zebra stripes and the leopard print, animals seem to be very conscious of their fashion. We are interested in the reason why such patterns are created. In addition to the epidermis of animals and fish, the concentration distribution of substances can also create patterns in chemical reactions. We are trying to find out a mechanism for creating such patterns using a certain type of equations.
PATTERN FORMATION
-
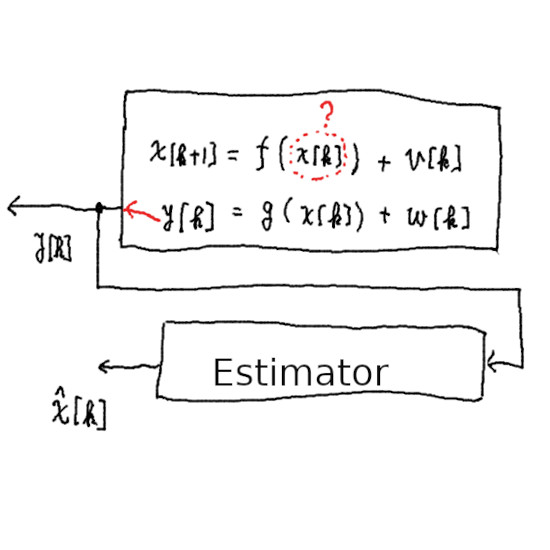
- State estimation of nonlinear systems
- Although it is impossible to know exactly what other people are thinking right now, we can read their emotions to some extent from their words and gestures. We try to find some estimation methods from the view point of engineering, that is available to estimate the state variables hidden in mechanical systems using the output signals generated by sensors. This becomes difficult due to noise, but if you use probability theory well, estimation results will be excellent.
STATE ESTIMATION
-
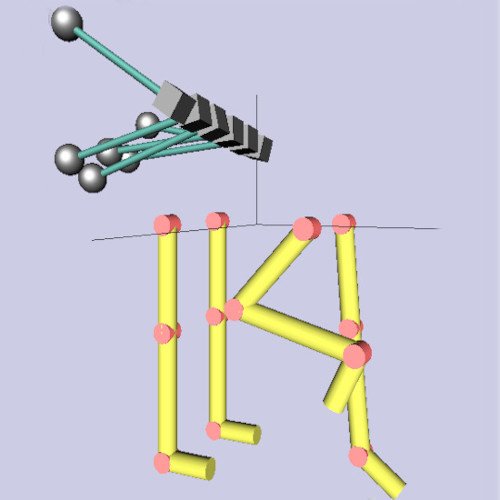
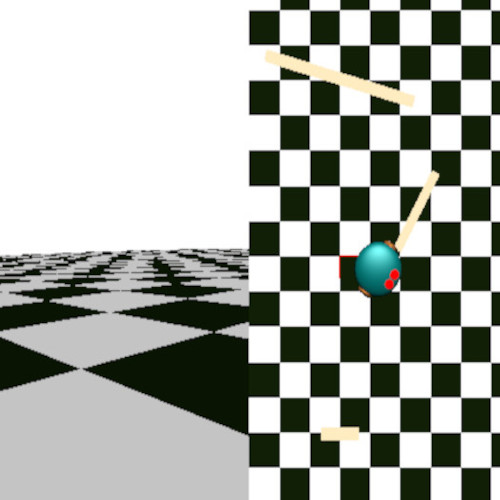
- Gait generation
- Have you ever observed how dog's legs move? Each joint of the four legs has rhythmic movements, that is, the angle of each joint increases or decreases. Inspired by this oscillation, we study modeling methods of quadrupedal walking with the simulation of pendulums like a metronome. This is related to the design of control systems for synchronization.
GAIT GENERATION
-
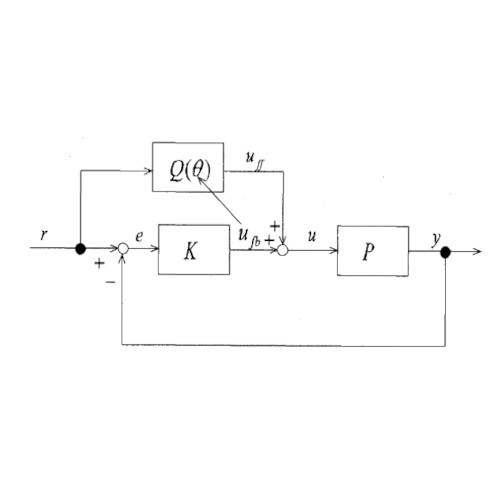
- Theory of learning and control
- The behavior of machine depends on the characteristics of individual machine. Knowing its characteristics is important for successful control, but these characteristics cannot easily be understood by measurements only, but rather can be obtained through trial and error and learning. We try to integrate learning theory and control theory, examining what and how to learn and how to utilize this learning for control.
LEARNING AND CONTROL
-
- Self-localization and control of robots
- Even when we visit an unknown place for the first time, we manage to reach our destination and find a restaurant where we can eat delicious food. We are trying to give robots this kind of intelligence as well. The robot runs around in an unknown environment, trying to understand where it is and what is around it from sensor information. We consider the methods for successful estimation and recognition.
MOBILE ROBOTS