研究紹介
-
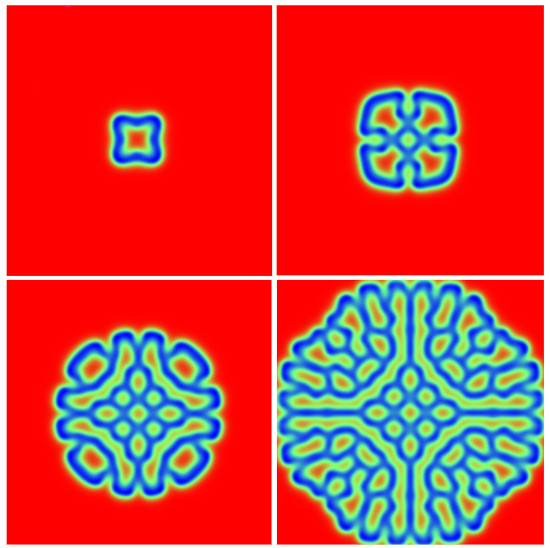
- 反応拡散系のパターン形成
- シマウマのストライプ,ヒョウのヒョウ柄,動物たちもなかなかオシャレですね.どうしてああいう模様が生まれたのでしょうか.動物や魚の表皮のほか,化学反応においても物質の濃度の分布が模様をつくることがあります.このような模様(パターン)が生まれる仕組みを,ある種の方程式から実現することを試みています.
PATTERN FORMATION
-
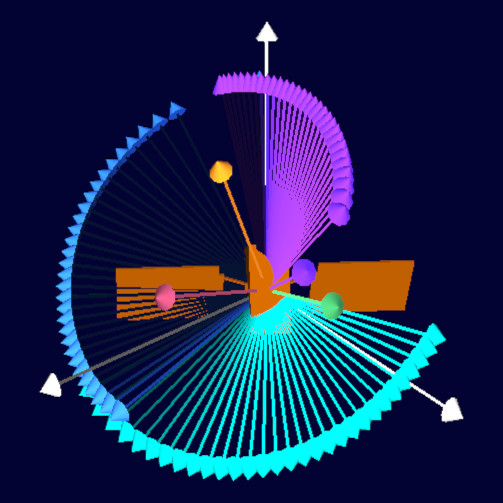
- 非線形システムの状態推定
- 他人が今何を思っているか,それを正確に知ることは不可能ですが,発する言葉や仕草からある程度は感情を読み取ることができます. 機械の外部に現れるセンサの情報から,機械の内部に潜んでいる状態を推定する方法を工学的に研究しています. 推定するシステムが持つべき数学的な特性を空間の幾何学として考えます.微分幾何学という難しい数学を応用します.
STATE ESTIMATION
-
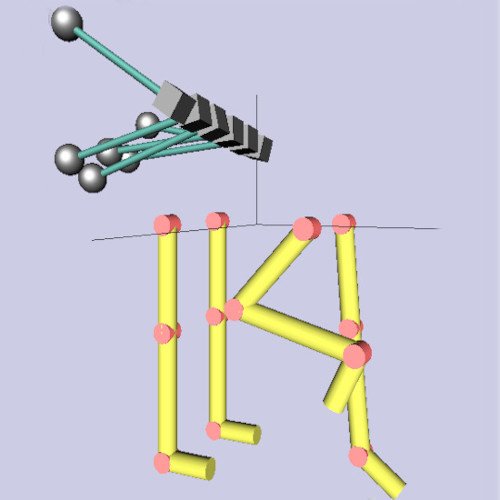
- 歩容の生成
- 犬の脚の動きをじっくり観察したことありまか?四本の脚のそれぞれの関節にはリズミカルな運動が生じています.各関節の角度は増えたり減ったり,値が振動しています. そこで,メトロノームのような振動を繰り返す多数の振り子を考え,多数の振動をそろえたりバラバラする制御を四足歩行の動作に関係づける研究をしています. (より詳しく)
GAIT GENERATION
-

- 動的システムとしてのゲームの理論
- 2次元平面上の状態が推移していくゲームを数学的に解析します.ゲームで遊ぶのではなく,ゲームに潜んでいる数学的理論を明らかにします. 自然界で生物が生成,消滅,移動するダイナミクスの解明,感染症の拡大とも関連した研究です.
GAME THEORY
-
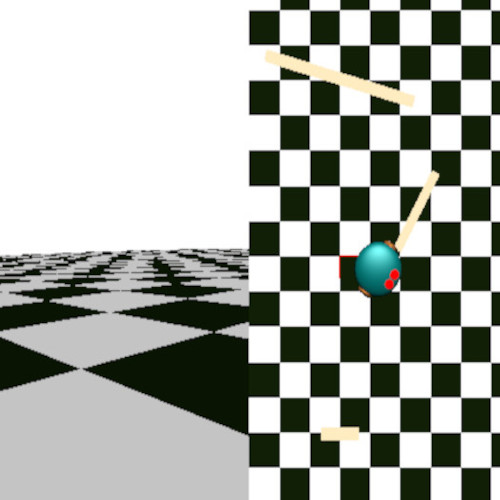
- ロボットの自己位置推定と制御
- 初めて訪れた知らない土地でも,私達はなんとか目的地にたどりつき,おいしい食事ができそうなお店を見つけ出します.ロボットにもこのような知能を持たせようと試みています.このロボットは未知の環境を走り回り,センサの情報から現在地がどこで周りに何があるかを理解しようと試みます.それを成功させるための推定や認識の研究をしています.
MOBILE ROBOTS